Task: A servo has to turn to three different positions. Between the movements there should be a short break.
Required equipment: Arduino / one servo / three cables
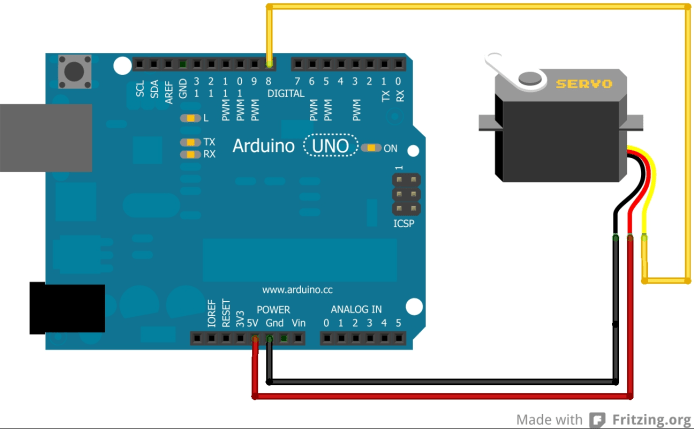
Setup:
Code:
#include <Servo.h> //Include the servo library
Servo servoblue; //The servo gets the name “servoblue”
void setup()
{
servoblue.attach(8); //The signal line of the servo is on pin 8
}
void loop()
{
servoblue.write(0); //Position 1 with an angle of 0°
delay(3000); //Wait 3 seconds
servoblue.write(90); //Position 2 with an angle of 90°
delay(3000); //Wait 3 seconds
servoblue.write(180); //Position 3 with an angle of 180°
delay(3000); //Wait 3 seconds
servoblue.write(20); //Position 4 with an angle of 20°
delay(3000); //Wait 3 seconds
}