Task: Measure a distance with the HC-SR04 ultrasonic sensor and show the result on the serial monitor.
Required equipment: microcontroller board / cables / Breadboard / HC-SR04 ultrasonic sensor
How does the ultrasonic sensor work?
The sensor has four pins.
a) 5V (+) b) GND(-) c) echo d) trigger
The contacts 5V and GND are meant for the power supply. Through the „trigger“ pin the sensor gets a short signal (5V) from the microcontroller board to create a sound wave. As soon as the sound wave hits a wall or other objects, it will be reflected and comes back to the ultrasonic sensor. When the sensor detects this returned sound wave, the sensor will send a signal to the Arduino microcontroller through the „echo“ pin. The Arduino-board measures the time between the transmission and the return of the sound wave, and converts this time into a distance.
Setup:
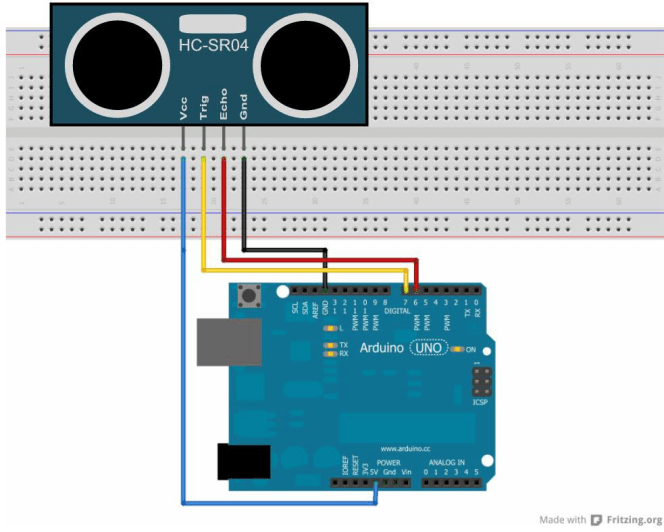
Code:
int trigger=7; //”trigger” on pin 7.
int echo=6; //”echo” on pin 6.
long time=0; //The value “time” will safe the time between transmission and returning of the soundwave.
long dist=0; //The value “dist” will save the calculated distance. It will start with “0”. Instead of “int” //we are using “long” for this value, to save a bigger number.
void setup()
{
Serial.begin (9600); //Starting the serial communication. It will send the data from the arduino board to //the computer to show it on the serial monitor.
pinMode(trigger, OUTPUT); //”trigger” (Pin 7) is an output.
pinMode(echo, INPUT); //”echo” (Pin 6) is an input.
}
void loop()
{
digitalWrite(trigger, LOW); //Low voltage on the trigger pin to produce a clear signal.
delay(5); //….for 5 milliseconds.
digitalWrite(trigger, HIGH); //Creating the soundwave.
delay(10); //..for 10 milliseconds.
digitalWrite(trigger, LOW); //Stop creating the soundwave.
time = pulseIn(echo, HIGH); //With the command pulseIn (Capital “i” in the front of the “n”) the arduino //board measures the time between sending and receiving the soundwave.
dist = (time/2) * 0.03432; //This calculation transforms the measured time into the distance in centimeter. //(The sound needs 29,1 seconds for one centimeter. The time gets divided with two, because we only want to //get one distance and not the two ways that the soundwave has to take).This value is multiplied with the //speed of sound (cm/ms) so you get the value for the distance in centimeter.
if (dist >= 500 || dist <= 0) //If the distance gets over 500cm OR under 0cm, the measurement is no longer //accurate.
{
Serial.println(„No measurement“); //So the serial monitor displays “No measurement”
}
else //otherwise
{
Serial.print(dist); //The calculated distance is shown on the serial monitor.
Serial.println(„cm“);
}
delay(1000); //This command causes a short break between the measurements.
}
Sketch without explanations:
int trigger=7;
int echo=6;
long time=0;
long dist=0;
void setup()
{
Serial.begin (9600);
pinMode(trigger, OUTPUT);
pinMode(echo, INPUT);
}
void loop()
{
digitalWrite(trigger, LOW);
delay(5);
digitalWrite(trigger, HIGH);
delay(10);
digitalWrite(trigger, LOW);
time = pulseIn(echo, HIGH);
dist = (time/2) * 0.03432;
if (dist >= 500 || dist <= 0)
{
Serial.println(„No measurement“);
}
else
{
Serial.print(dist);
Serial.println(„cm“);
}
delay(1000);
}
Extension of the sketch
If the distance is less than 80cm, the piezo speaker should beep.
int trigger=12;
int echo=13;
long time=0;
long dist=0;
int piezo=5; //Piezo speaker on pin 5.
void setup()
{
Serial.begin (9600);
pinMode(trigger, OUTPUT);
pinMode(echo, INPUT);
pinMode(piezo, OUTPUT); //The pin (5) connected to the piezo is a output.
}
void loop()
{
digitalWrite(trigger, LOW);
delay(5);
digitalWrite(trigger, HIGH);
delay(10);
digitalWrite(trigger, LOW);
time = pulseIn(echo, HIGH);
dist = (time/2) * 0.03432;
if (dist >= 500 || dist <= 0)
{
Serial.println(„No measurement„);
}
else
{
Serial.print(dist);
Serial.println(„cm„);
}
if (dist <= 80) //If the measured distance gets 80 or shorter…
{
digitalWrite(piezo,HIGH); //..the piezo should beep
}
else //If not …
{
digitalWrite(piezo,LOW); //..the speaker should be quiet.
}
delay(1000);
}
Reverse warning system
With this code we are able to create a reverse warning system. Additional to the ultrasonic sensor we are going to connect a LED with pin 12.
Are you able to construct a reverse warning system without any images?
int trigger=7;
int echo=6;
long time=0;
int LED=12;
long dist=0;
void setup()
{
Serial.begin (9600);
pinMode(trigger, OUTPUT);
pinMode(echo, INPUT);
pinMode(12, OUTPUT);
}
void loop()
{
digitalWrite(trigger, LOW);
delay(5);
digitalWrite(trigger, HIGH);
delay(10);
digitalWrite(trigger, LOW);
time = pulseIn(echo, HIGH);
dist = (time/2) * 0.03432;
if (dist >= 500 || dist <= 0)
{
Serial.println(„No measurement„);
}
else
{
Serial.print(dist);
Serial.println(„cm„);
}
if (dist <= 40)
{
digitalWrite(LED, HIGH);
delay(dist*3);
digitalWrite(LED, LOW);
delay(dist*3);
}
}